이 내용은 이 내용를 참조하여 만들었습니다.
FreeRTOS?
FreeRTOS는 Cross platform RTOS(Real-Time Operating System) 커널로 업계에서 꽤 많이 사용되는 OS1입니다. 이런 FreeRTOS는 아래의 특징을 가집니다.
- 전문적인 개발이 가능함
- 엄격한 품질 관리가 가능함
- 견고한 시스템을 개발 할 수 있음
- 상용으로 사용해도 상관없이 무료임2
이것을 사용하면 임베디드 환경에서의 동시성 프로그래밍을 쉽게 할 수 있습니다. 또한, 이런 동시성 프로그래밍 환경에서 태스크3간의 데이터 교환이나 동기화 문제를 FreeRTOS를 사용하면 효과적으로 문제를 풀 수 있는 장점이 있습니다.
ATMega128 + FreeRTOS
하지만 FreeRTOS가 ATmega128에서 포팅된 Demo가 공식 사이트에서는 존재하지 않습니다. 대신 ATMega323으로 포팅된 데모가 있는 데 그 데모를 기반으로 ATMega128에 포팅을 진행하도록 하겠습니다.
프로젝트 구성 과정
먼저 FreeRTOS 공식 사이트에서 FreeRTOS 파일을 다운로드하도록 합니다. 그리고 다운이 완료되면 적절한 위치에 다운로드 받은 파일을 실행시켜 압축을 설치하도록 합니다.
그런 다음에 Atmel Studio 7.0을 실행 시켜주도록 합니다. 화면이 뜨면 File → new → project를 클릭하고 GCC C Executable Project를 선택하여 적절한 이름을 지어주도록 합니다.
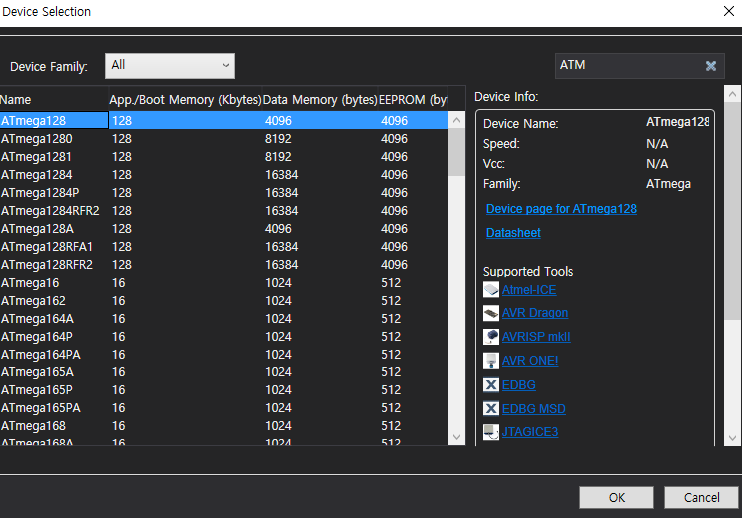
이러면 장치 선택 창이 뜰 것입니다. 여기서 반드시 ATMega128을 선택해주도록 합니다.
제일 처음 할 일은 프로젝트의 root(최상위 폴더)에 Source라는 폴더를 만들어주도록 합니다.
다음으로 FreeRTOS를 앞서 설치한 위치의 FreeRTOS/Source 디렉토리를 찾아가도록 합니다.
drwxr-xr-x 1 sample 197609 0 5월 13 11:58 include/
drwxr-xr-x 1 sample 197609 0 5월 11 10:12 portable/
-rw-r--r-- 1 sample 197609 13177 5월 11 10:24 croutine.c
-rw-r--r-- 1 sample 197609 26791 5월 11 10:24 event_groups.c
-rw-r--r-- 1 sample 197609 8475 5월 11 10:24 list.c
-rw-r--r-- 1 sample 197609 96319 5월 11 10:24 queue.c
-rw-r--r-- 1 sample 197609 822 2월 18 02:38 readme.txt
-rw-r--r-- 1 sample 197609 43728 5월 11 10:24 stream_buffer.c
-rw-r--r-- 1 sample 197609 174827 5월 11 10:24 tasks.c
-rw-r--r-- 1 sample 197609 40685 5월 11 10:24 timers.c
위 디렉토리에서 croutine.c ~ timers.c 파일을 아까 프로젝트 창에서 만든 Source 폴더에 넣어주도록 합니다. 그리고 프로젝트의 Source의 하위 폴더로 include를 만들어주도록 합니다. 그리고 FreeRTOS/Source 안에 있는 include 폴더를 프로젝트의 Source/include에 넣어주도록 합니다.
그리고 프로젝트에 Source의 하위 폴더로 portable 폴더를 만들어주고, FreeRTOS/Source/portable/GCC/ATMega323 폴더 안의 내용은 Source/portable/GCC/ATMega323에 FreeRTOS/Source/portable/MemMang에 넣고 있는 heap_1.c 파일을 Source/portable/MemMang에 넣어주도록 합니다.
프로젝트 포팅 과정
마지막으로 FreeRTOS/Demo/AVR_ATMega323_WinAVR/FreeRTOSConfig.h를 루트 디렉토리에 넣어주도록 합니다. 해당 파일의 내용을 아래와 같이 만들어주도록 합니다.
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include <avr/io.h>
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 7372800 )
#define configTICK_RATE_HZ ( ( portTickType ) 1000 )
#define configMAX_PRIORITIES ( /*( unsigned portBASE_TYPE )*/ 32 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 85 )
#define configTOTAL_HEAP_SIZE ( (size_t ) ( 3500 ) )
#define configMAX_TASK_NAME_LEN ( 8 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 1
#define configIDLE_SHOULD_YIELD 1
#define configQUEUE_REGISTRY_SIZE 0
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
#define INCLUDE_vTaskPrioritySet 0
#define INCLUDE_uxTaskPriorityGet 0
#define INCLUDE_vTaskDelete 0
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 0
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 0
#endif /* FREERTOS_CONFIG_H */
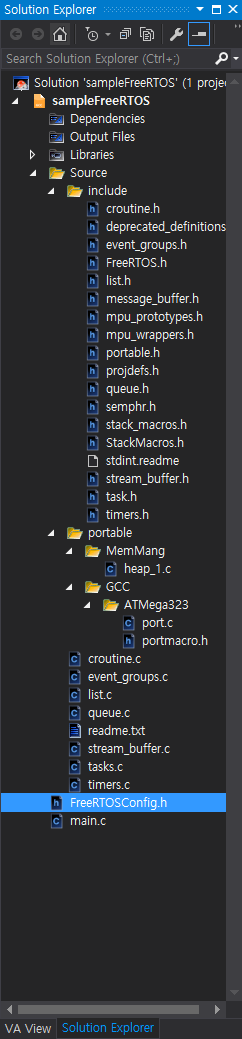
정리하면 Solution은 아래와 같은 디렉토리 구조를 가져야만 합니다.
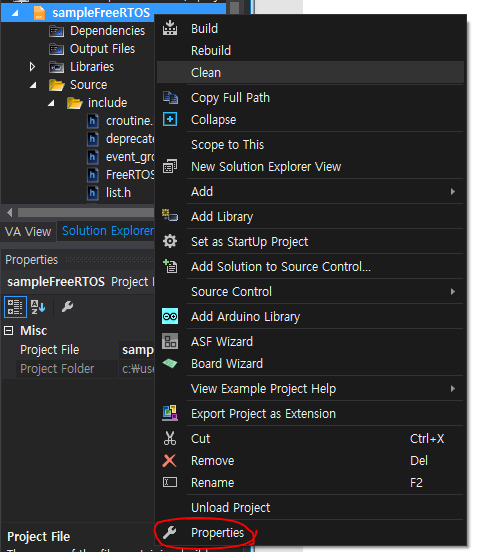
이제 프로젝트 설정을 하도록 하겠습니다.
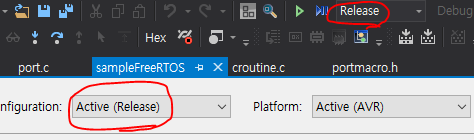
이때, 반드시 Release 설정이 되었는 지를 확인하도록 합니다.
이것을 반드시 해줘야 하는 이유는 이를 수행하지 않은 경우 높은 확률로 Segmentation Fault를 빌드 중에 발생시키기 때문입니다.
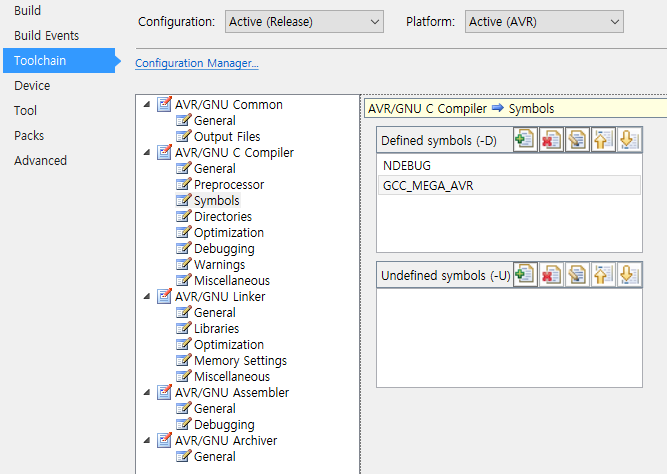
먼저 Toolchain에서 symbol에 GCC_MEGA_AVR 값을 아래와 같이 추가해주도록 합니다.
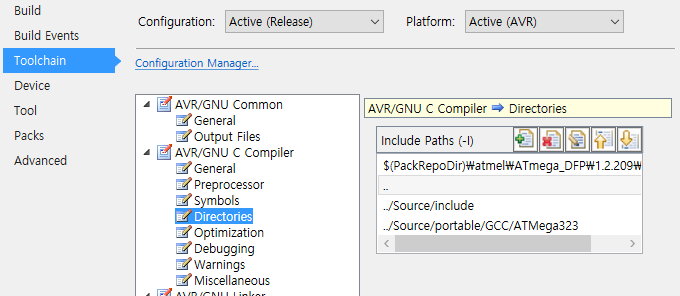
그리고 Toolchain의 Directories에서 Include Paths에 Source/include와 Source/portable/GCC/ATMega323과 root 폴더(..으로 표기)를 넣어주도록 합니다.
다음으로 Source/portable/GCC/ATMega323/port.c 파일을 찾아가도록 합니다. 여기서 SIG_OUTPUT_COMPARE1A을 찾습니다. 이 방식은 오래된 방식이기 때문에 문서를 참고해서 최신 ATMega128에 맞는 규격인 TIMER1_COMPA_vect로 변경해주도록 합니다. 그러면 다음과 같은 파일이 될 것입니다.
// port.c 파일
// (앞 부분 생략)
/*-----------------------------------------------------------*/
#if configUSE_PREEMPTION == 1
// void SIG_OUTPUT_COMPARE1A( void ) __attribute__ ( ( signal, naked ) );
// void SIG_OUTPUT_COMPARE1A( void )
void TIMER1_COMPA_vect( void ) __attribute__ ( ( signal, naked ) );
void TIMER1_COMPA_vect( void )
{
vPortYieldFromTick();
asm volatile ( "reti" );
}
#else
// void SIG_OUTPUT_COMPARE1A( void ) __attribute__ ( ( signal ) );
// void SIG_OUTPUT_COMPARE1A( void )
void TIMER1_COMPA_vect( void ) __attribute__ ( ( signal ) );
void TIMER1_COMPA_vect( void )
{
xTaskIncrementTick();
}
#endif
여기까지 했으면 이제는 장치를 잡아주고
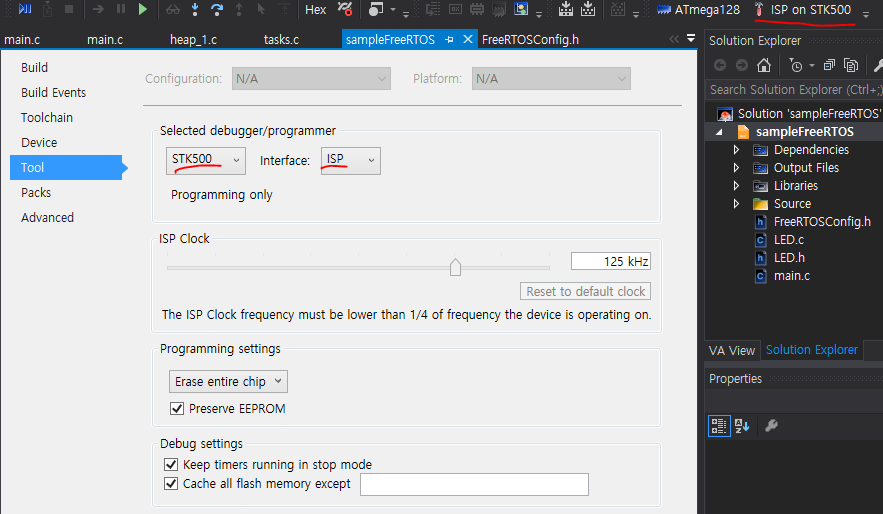
FreeRTOS를 가지고 이것과 같이 다양한 RTOS를 활용한 프로그램을 만드시면 됩니다.
실행 예제
2개의 LED를 PD0와 PD1을 사용하여 하나는 500ms 주기로, 다른 하나는 1s 주기로 껐다 켜는 예제입니다. 각각의 파일을 루트에 만들어주고 돌리면 됩니다.
LED.c
/*
* LED.c
*
* Created: 2019-07-06 오후 2:55:28
* Author : BlaCkinkGJ
*/
#include "FreeRTOS.h"
#include "task.h"
#include "LED.h"
void vLEDinit( volatile uint8_t *ddr, uint8_t bit ) {
*ddr |= (1 << bit);
}
void vLEDset( volatile uint8_t *port, uint8_t bit, signed portBASE_TYPE xValue ) {
if (xValue == pdTRUE) {
*port &= ~(1 << bit);
} else {
*port |= (1 << bit);
}
}
void vLEDtoggle( volatile uint8_t *port, uint8_t bit) {
*port ^= (1 << bit);
}
LED.h
/*
* LED.h
*
* Created: 2019-07-06 오후 2:55:28
* Author : BlaCkinkGJ
*/
#ifndef LEDTEST_H
#define LEDTEST_H
#include <inttypes.h>
void vLEDinit( volatile uint8_t *ddr, uint8_t bit );
void vLEDset( volatile uint8_t *port, uint8_t bit, signed portBASE_TYPE xValue );
void vLEDtoggle( volatile uint8_t *port, uint8_t bit );
#endif
main.c
/*
* main.c
*
* Created: 2019-07-06 오후 2:55:28
* Author : BlaCkinkGJ
*/
#include <avr/io.h>
#include "FreeRTOS.h"
#include "task.h"
#include "LED.h"
#define mainLED_TASK_PRIORITY tskIDLE_PRIORITY
void vLEDFlashTask1(void *pvParameters) {
portTickType xLastWakeTime;
const portTickType xFrequency = 500;
vLEDinit(&DDRD, 0);
xLastWakeTime = xTaskGetTickCount();
while(1) {
vTaskDelayUntil(&xLastWakeTime, xFrequency);
vLEDtoggle(&PORTD, 0);
}
}
void vLEDFlashTask2(void *pvParameters) {
portTickType xLastWakeTime;
const portTickType xFrequency = 1000;
xLastWakeTime = xTaskGetTickCount();
vLEDinit(&DDRD, 1);
while(1) {
vTaskDelayUntil(&xLastWakeTime, xFrequency);
vLEDtoggle(&PORTD, 1);
}
}
portSHORT main(void){
xTaskCreate(vLEDFlashTask1,
(const char *)"LED1",
configMINIMAL_STACK_SIZE,
NULL,
mainLED_TASK_PRIORITY,
NULL);
xTaskCreate(vLEDFlashTask2,
(const char *)"LED2",
configMINIMAL_STACK_SIZE,
NULL,
mainLED_TASK_PRIORITY,
NULL);
vTaskStartScheduler();
while (1) { }
return 0;
}